|
1. Encoder전원은 독립 Line으로 공급하는 것이 좋습니다. |
|
2. 당사 Encoder를 Motor에 실장시 Encoder Shield선과 Motor Body와의 접지가 이루어지지 않으면 |
|
Motor에서 생기는 유도 Noise Encoder출력에 영항을 줄 수 있으므로 반드시 Encoder Shield선과 |
|
Motor Body사이에 공통접지를 시켜야 합니다. |
|
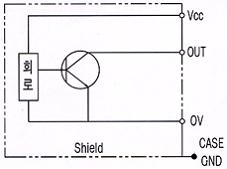
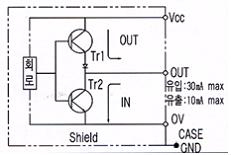
Encoder 회로 내부에는 Shield선(Case GND)과 OV(Earth)사이에 수 μF의 콘덴서로 Noise방지회로 |
|
가 구성되어 있습니다. |
|
3. Encoder 출력전송상에 있어서 |
|
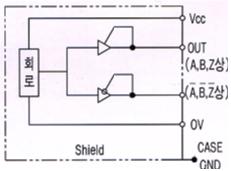
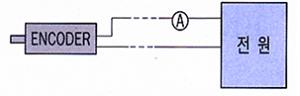
① 전원의 접지선과 GND선은 반드시 Pair로 구성하되 동일 Shield선으로 전송해야 합니다. |
|
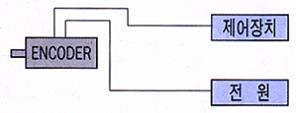
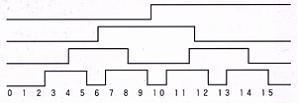
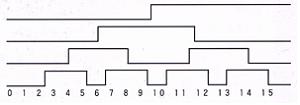
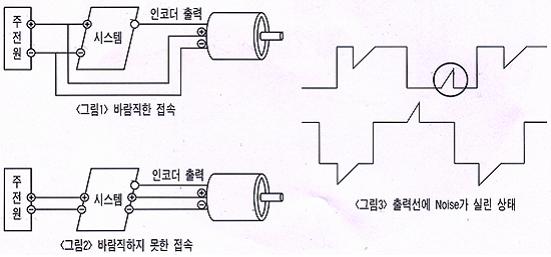
또한 동일전원에 의해서 Encoder와 동시에 동작하는 System에 전원을 공급할 경우 만약 System을 |
|
경유하여 (그림2)Encoder에 전원을 공급하면 System내의 OV Bus의 임피던스에 의해 Encoder의 |
|
OV와 전원의 OV사이에 전위차가 생기기 때문에 Noise가 발생되어 Encoder가 오동작할 수 있는 원 |
|
인이 됩니다. |
|
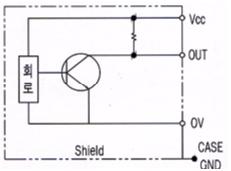
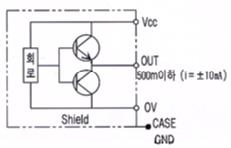
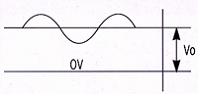
② Case Ground와 Circuit Ground의 단락환경이 나빠 Case Ground와의 사이에 10V 이상의 Noise가 |
|
실리는 경우 Encoder 전자회로가 이 Noise에 의해 오 동작을 일으키는 경우가 있습니다. |
|
이러한 때 Case Ground와 Circuit Ground를 단락하여, 또 다른 악영향을 나타날 경우에는 Case |
|
Ground와 Circuit Ground사이에 Noise Filter용의 주파수 특성이 좋은 수 μF의 콘덴서를 삽입하면 |
|
좋습니다. |
|
③ 전원선에 Noise가 실리는 경우 전원선에는 Noise가 실리지 않도록 완전히 실드된 전송선으로 |
|
전원을 Encoder에 공급하지 않으면 안됩니다. |
|
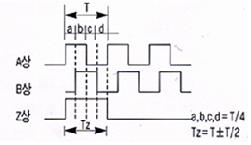
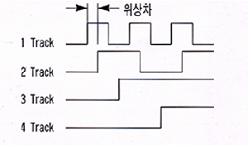
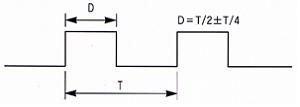
④ Encoder 출력신호간에 아래 그림3과 같은 스파크 파형이 실리는 경우에는 Twist Pair Shield선 |
|
으로 전송하면 스파크 파형이 없어집니다 |
|
|