서보모터의 회전원리와 기본구성
1. 회전원리
서보모터 회전의 기본원리는 [플레밍의 왼손 법칙]이라고 하는 전기와 자기의 상호작용에 의해 힘이 발생하는 법칙에 의존한다.
플레밍의 왼손 법칙이란 위에 있는 그림에서 보는 바와 같이 자계의 방향과 직각 방향에 놓인 도체에 전류를 흘리면 자계의 방향과 전류의 방향 각각에 직작인 방향으로 힘이 발생하여, 자계의 방향을 왼손의 검지방향, 전류의 방향을 중지방향으로 했을 때, 힘의 방향은 엄지방향이 된다고 하는 것이다.
그 힘의 크기를 F(단위는 N(뉴턴))라고 하면
F = BILsinθ
이 된다. 단
B : 자계의 자속밀도, 단위는 T(테슬러)
I : 전류, 단위는 A(암페어)
L: 도선의 유효길이(자력선과 직교하는 부분), 단위는 m(미터)
θ: 전류의 방향과 자기장의 방향이 이루는 각도
이 힘에 의한 회전력(토크)을 발생시켜 계속 회전하도록 한 것이 모터이다.
2. 모터의 기본구조
서보모터는 영구자석측을 고정하고 도선측을 회전하는 구조와 영구자석 측을 회전으로 하는 구조가 있습니다. 고정측을 스테이터라고 하며, 회전하는 축을 로터라고 합니다.
1) DC 서보모터
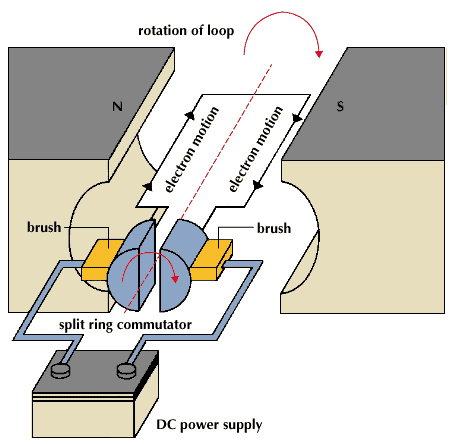
위의 그림은 영구자석측을 고정하고 도선측이 회전하는 구조이다. 간단히 원리에 대하여 설명하면 왼쪽면은 플레밍의 왼손법칙에 따라 아래 방향으로 전자기력을 받는다. 그리고 왼쪽면과 마주보는 오른쪽면은 전류가 반대방향이기 때문에 위의 방향으로 전자기력을 받아서 회전을 하게 된다.
만일 계속 같은 방향으로 전류가 흐른다면 도선이 반대 방향으로 간다면 역회전을 하게 될것이다. 그래서 고정측에 브러시, 회전축에 커뮤데이터를 설치하여 로터가 회전하여 반대방향으로 왔을 때 전류의 흐름이 반대로 되어 동일한 방향으로 회전을 계속할 수 있다.
2) 브러시리스 모터
DC 모터는 커뮤데이터와 브러시가 마찰부분이 있어 브러시분말과 브러시, 커뮤데이터의 손상의 보상이 필요한 단점이 있었다. 그 단점을 보완한 것이 바로 브러시리스 모터이다.

위의 사진은 브러시리스 모터의 기본구조이다. DC 모터와는 반대로 도선측이 고정되어 있고 영구자석측이 회전하는 구조이다. 도선을 철심에 감은 이유는 자력선이 공기 중에는 통과하기가 어려우나 금속은 통과하기 쉽기 때문이다. 즉 회전력을 더욱 강하게 하기 위해서이다.
위는 3상 교류 기전력이며 이것을 이용하여 모터가 회전하게 된다. 즉 각각의 철심에 전류에 따라 극이 바뀌게 되며 그것에 의해 모터가 회전하게 되는 것이다.
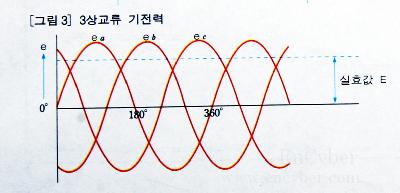
위의 그림은 3상 전류에 의해 회전자가 돌아가는 원리를 나타낸 것이다. 영구자석이 차례대로 바뀌는 자력에 의해서 회전하는 것을 알 수 있다.
이 때 발생하는 토크는
T = 3LRBI/2
T : 토크, 단위는 N * m
L : 도선의 유효길이(자력선과 직교하는 부분), 단위는 m(미터)
R :모터의 반지름(m)
B : 자계의 자속밀도, 단위는 T(테슬러)
I : 전류, 단위는 A(암페어)
이 때 L과 R 그리고 B는 모터의 설계에서 정해진 값이기 때문에
KT = 3LRB/2
라고 하고 KT는 토크상수라고 부른다.
T = KTI
라고 정리할 수 있으며 토크는 전류의 크기에 비례하는 것을 알 수 있다.
'**모 터 방** > <서보모타>' 카테고리의 다른 글
| AC 서보모터 제어기술 (0) | 2008.05.04 |
|---|---|
| 서보모터 기술 (0) | 2008.05.04 |
| 인코더(Encoder) 서보 (0) | 2008.05.04 |
| (DC Motor) 서보 (0) | 2008.05.04 |
| 서보의 정의 (0) | 2008.05.04 |