서보모터 기술 서보모터 기술 1. 서보(Servo) 의 정의 서보란 서보메커니즘의 줄임말로써 일본공업규거 (JIS)에서는 "물체의 위치, 병위, 자세 등을 제어량으로 하고 목표치의 dal의 변화에 추종하도록 구성된 제어계" 라고 정의되어 있다. 또한 서보는 Servant(하인) 이라는 단어에 기인 하였다고 하는데 이는 "주인에 충실.. **모 터 방**/<서보모타> 2008.05.04
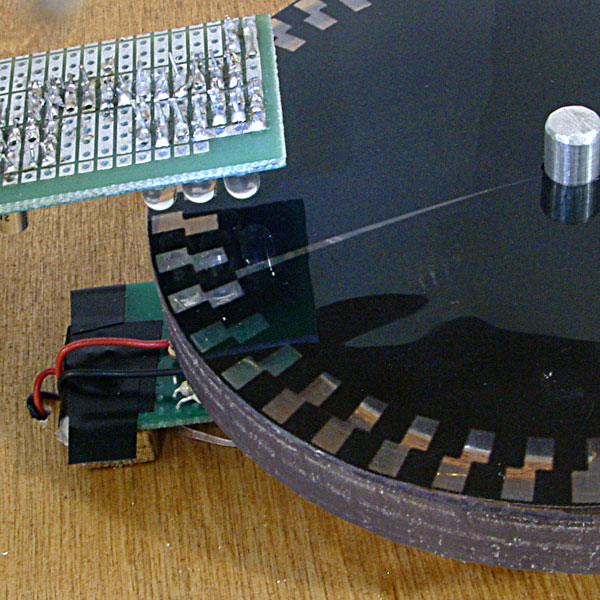
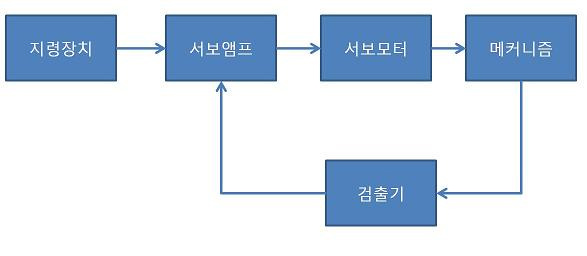
인코더(Encoder) 서보 인코더(Encoder) 서보 인코더의 역할 서보의 본질은 피드백 제어를 하여 지령치와 현재치의 차이를 0이 되게 되도록 제어하는 것이다. 그렇게 하기 위해서는 현재치의 정확한 검출이 필요하다. 인코더는 현재치의 정확한 검출을 담당하며 그 역할을 크게 2가지로 나눌 수 있다. 1. 전기각 검출 모터를 회.. **모 터 방**/<서보모타> 2008.05.04
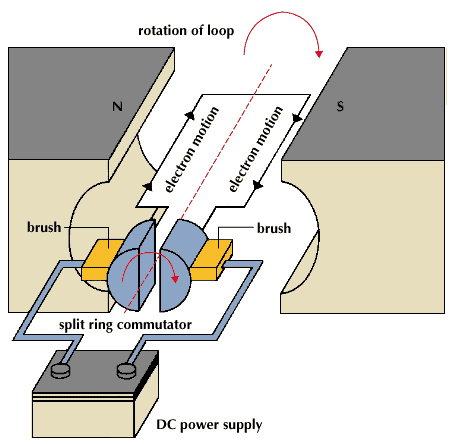
(DC Motor) 서보 Direct Current Motor Direct Current Motor(DC Motor)는 직류전원을 이용해 회전하는 모터를 말한다. 다음과 같이 크게 세가지로 구분할 수 있다. Brushed Motor Brushless Direct Current Motor(BLDC Motor) Coreless Motor Brushed Motor Brushed Motor는 말 그대로 브러시가 있는 모터를 말하며 브러시와 커뮤테이터를 이용해 전류의 방향을 변.. **모 터 방**/<서보모타> 2008.05.04
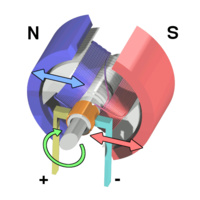
서보모터의 회전원리와 기본구성 서보모터의 회전원리와 기본구성 1. 회전원리 서보모터 회전의 기본원리는 [플레밍의 왼손 법칙]이라고 하는 전기와 자기의 상호작용에 의해 힘이 발생하는 법칙에 의존한다. 플레밍의 왼손 법칙이란 위에 있는 그림에서 보는 바와 같이 자계의 방향과 직각 방향에 놓인 도체에 전류를 흘리면 자계의 .. **모 터 방**/<서보모타> 2008.05.04
서보의 정의 서보의 정의 서보는 정확하게 서보기구 또는 서보 메카니즘이라고 하며, 자동제어의 한 분야를 말한다. 말의 의미는 JIS에서 [물체의 위치, 방위, 자세를 제어량으로 하여, 목표치의 임의의 변화에 추종하도록 구성된 제어계]로 정의되어 있다. 서보의 어원 서보(Servo)라는 말은 1934년 H.L Hazen에서 처음으.. **모 터 방**/<서보모타> 2008.05.04
호도법 사용시 편리한 점은 호도법 사용시 편리한 점은? 1도를 1로 하는 것 보다 1라디안을 1로 사용하면 무엇이 편리한가요? 답변 부탁드립니다. 호도법의 편리한 점 앞 분은 정곡을 못 찌르셨군요. 각의 크기를 나타내는 방법은 여러 가지가 있을 수 있습니다. 하지만 가장 편리한 것을 찾게 되지요. 잘 아시다시피 360도로 하는 .. **공 식 방**/<수학공식> 2008.05.04
스태핑 모터 모터분류별 특징 분 류 원리 및 특징 스태핑 모터 (Stepping Motor) 스텝모터, 펄스모터,스테퍼모터 등으로 불려지고 있으며 스태핑은 한 발 한 발 단계적으로 움직이는 동작이미지를 표현하고 있다 최대 특징은 펄스 전력에 대응하여 회전한다는 것이며, 피드백 없이 동작을 제어할 수 있으므로 FA, OA 관계.. **모 터 방**/<스테핑M> 2008.05.04
모터란 모터란? 전기적 에너지를 기계적 에너지로 변환하는 장치 모터분류별 특징 분 류 원리 및 특징 유도 모터 (Induction Motor) 고정자 권선에 흐르는 교류(교번) 전류에 의해 발생하는 회전 자기장과 로토부에 발생하는 유도 전류와의 상호 작용에 의해 생기는 회전력에 의한 모터이다. 때문에 익덕션 모터를 .. **모 터 방**/<모터기술> 2008.05.04
모터용어 용 어 설 명 고정자 스테더(stator)라고도 하며, 계철,계자용 영구자석 등을 포함하는 회전기의 주요 정지부분이다 관성 외력이 작용하지 않는 한 물체가 그 운동 상태를 유지하려고 하는 성질 계철 요크(yoke)라고도 하며, 자극과 자극을 자기적으로 접속하는 역할을 한다 기계적 시상수 모터가 기동하기.. **모 터 방**/<모터기술> 2008.05.04
모터 기본 용어기술 필독 1.Nominal Voltage(V) 정격전압 모터의 모든특성을 고려하여 최적치로 설정 2.Terminal Resistance(Ω) 단자간 저항 상온에서 측정된 모터 양단자간의 전기적 저항치(코어리스모터의경우 접점부품의 저항도 포함) 이값은 정류자와 브러시의 위치에 따라서 변동됨. 3.Output power(W) 최대출력 정격정압에서 운전시 모.. **모 터 방**/<모터기술> 2008.05.04